2D-Transformationen
sämtliche Transformationen gehen vom Zentrum des Koordinatensystems aus, nicht vom Mittelpunkt des Objektes
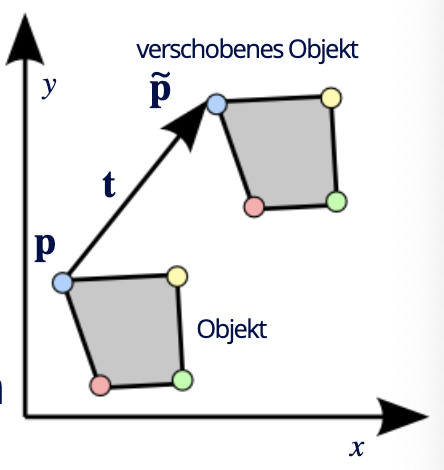
2D-Translation
- Veränderung der Position
- gegebener Stützpunkt
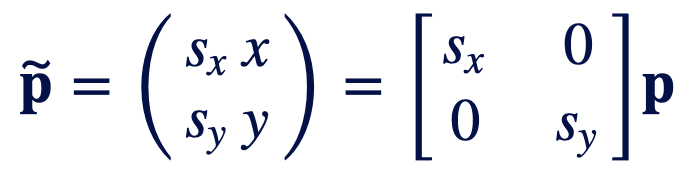
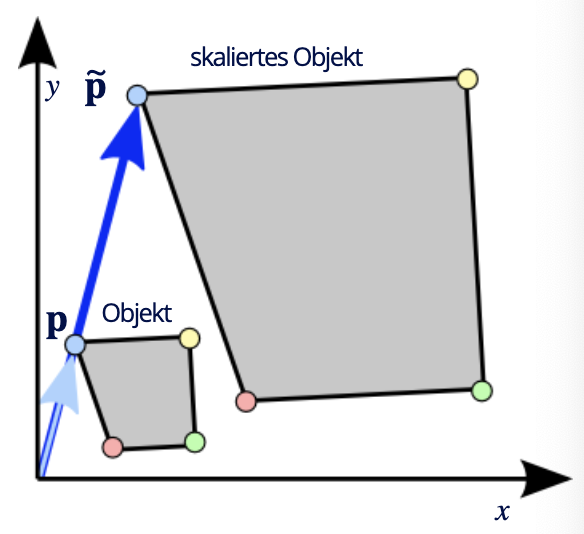
2D-Skalierung
Veränderung der Größe
Multiplikation mit Skalierungsfaktor(en)
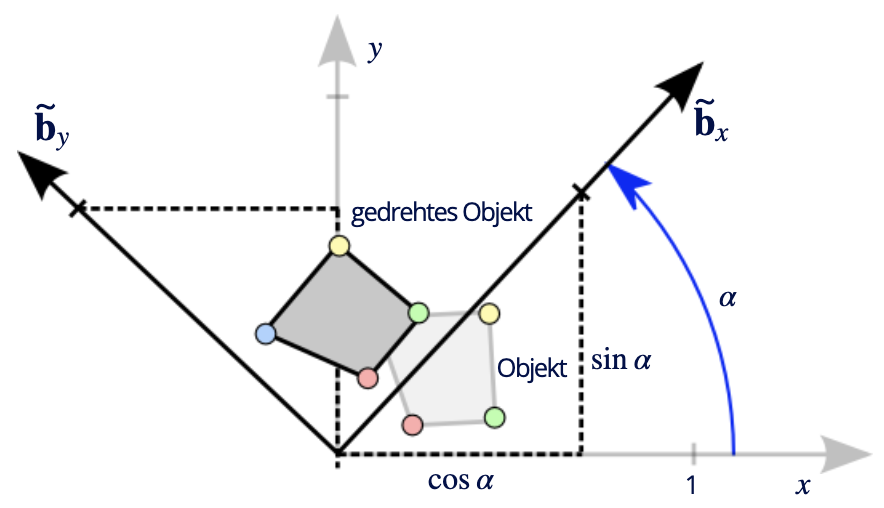
2D-Rotation
- Idee: Rotation des Koordinatensystems und anschließend Zeichnung des unveränderten Objektes in neuem Koordinatensystem
hierfür: Wie bilden sich die neuen Koordinatenachsen auf die alten ab.
Es ergeben sich damit die Koordinaten des rotierten Punktes:
mit Rotationsmatrix
also:
Kombination der Transformationen
Beispiel: erst skalieren, dann rotieren, schließlich translieren
Linearkombination
Vektoren lassen sich als Linearkombination von Basisvektoren darstellen:
Basisvektoren sind die linear unabhängigen Vektoren, die nötig sind, um alle Vektoren einer Dimension (= Anzahl der Basisvektoren) beschreiben zu können
- linear unabhängig = nicht durch Linearkombination anderer Vektoren beschreibbar
- z.B. für
- Es kann somit eine Transformationsmatrix durch eine Linearkombination der Basisvektoren erzeugt werden
Homogene Koordinaten
- Motivation: Translation ebenfalls als lineare Abbildung bzw. durch Matrixmultiplikation realisieren
Vektoren erhalten zusätzliche Komponente (eine Dimension höher):
translatierter Punkt:
mit Rotations-/Skalierungsmatrix
nur durch die Hinzunahme der weiteren Dimension wird die Matrixmultiplikation mathematisch möglich
Anmerkung: Skalierung der homogenen Koordinaten hat keine Auswirkung auf dessen kartesische Koordinaten
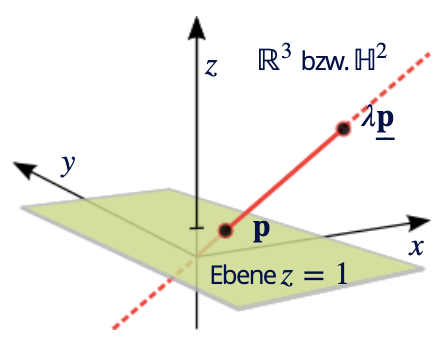
Damit entspricht jedes Element aus
- Bei diversen Transformationen hintereinander können diese alle im homogenen Raum durchgeführt werden und das Ergebnis erst zum Schluss per Division durch die letzte Koordinate (w) auf den karthesischen (euklidischen) Raum rücktransformiert werden.
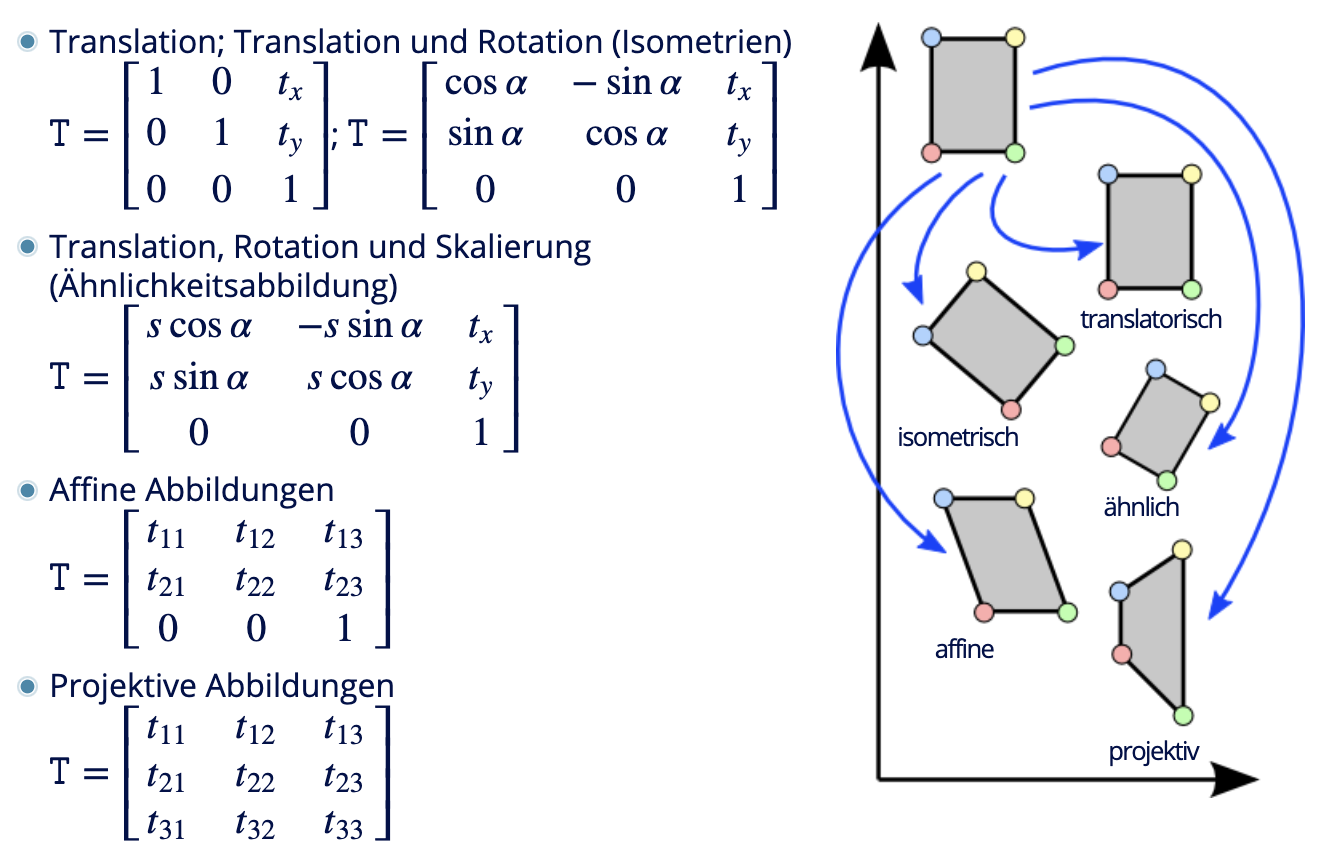
Klassifizierung von Transformationen