Perspektivische Projektion
Einleitung
Projektion = Abbildung von 3D-Objekten in 2D-Bildebene
Klassifikation von Kameramodellen
perspektivische Projektion
- weiter entfernte Objekte erscheinen kleiner

Parallelprojektion

Lochkamera
einfachstes Modell der perspektivischen Abbildung
ähnlich menschlichem Auge
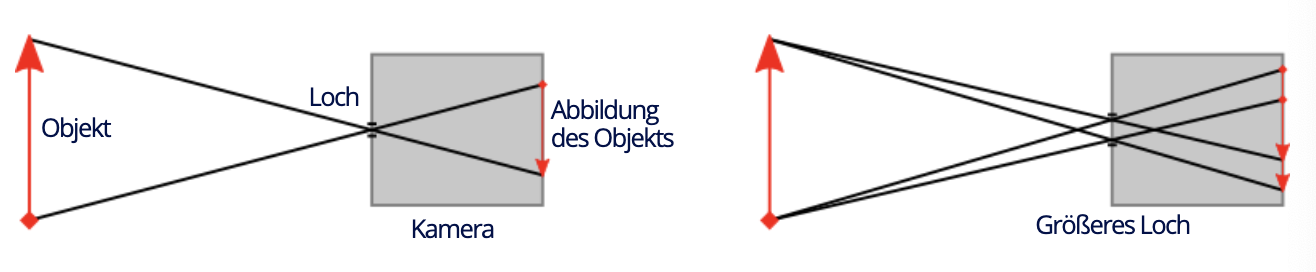
Schärfentiefe nimmt bei größerer Öffnung ab
Computergrafik verwendet idealisiertes Lochkameramodell mit unendlich kleinem Loch
Tiefenunschärfe kann nicht direkt simuliert werden
imaginäre BIldebene liegt vor Projektionszentrum

mathematische Grundlagen
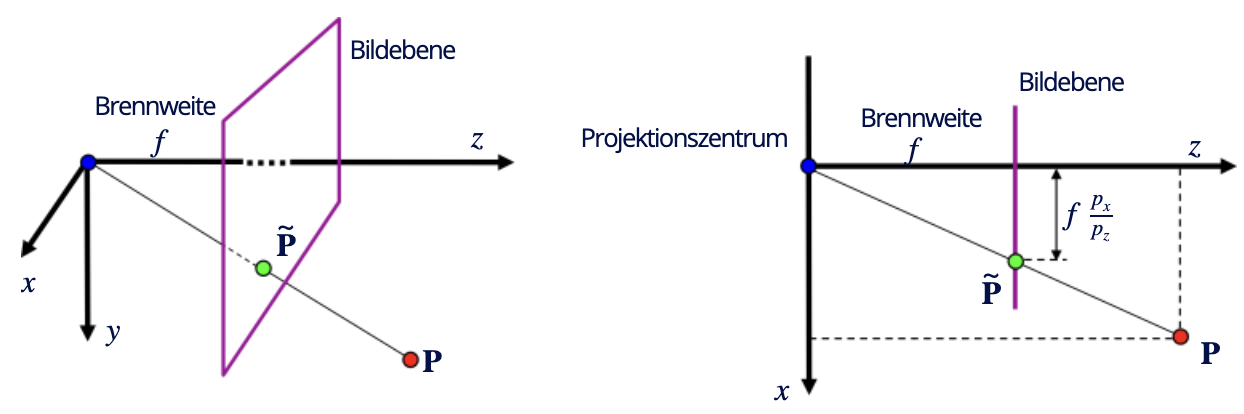
Abbildungsmatrix:
bei OpenGL zeigt die Kamera in negative z-Richtung, daher:
perspektivische Projektion in OpenGL
Nearplane und Farplane verlaufen parallel zur Bildebene und begrenzen darzustellenden Bereich in z-Koordinate
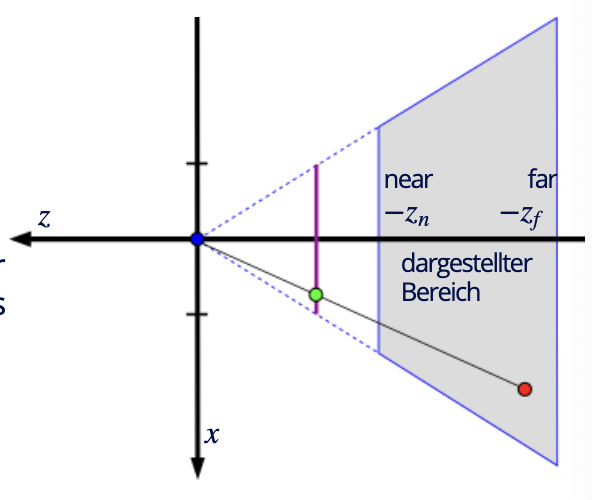
- wichtig, da unendlicher Bereich nicht mit endlicher Präzision darstellbar wäre
- Bereich zwischen Near- und Farplane wird auf
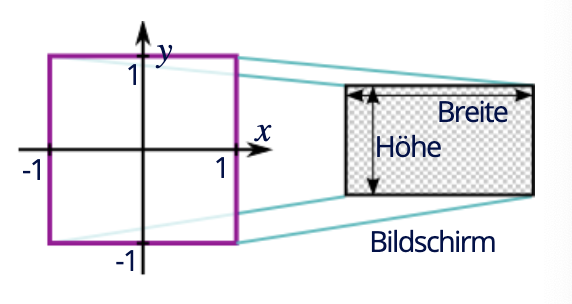
Für darzustellenden Bereich ist vor allem der Öffnungswinkel
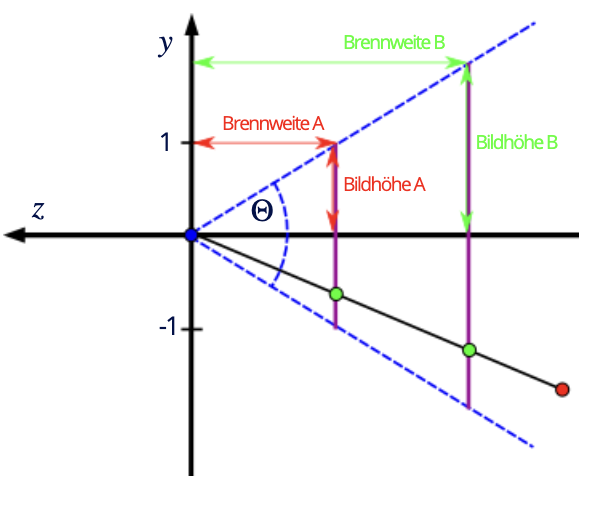
- Größe der Bildebene wird in OpenGL so gewählt, dass x- und y-Koordinaten im Bereich
- Größe der Bildebene wird in OpenGL so gewählt, dass x- und y-Koordinaten im Bereich
Für Projektion von Kamerakoordinatensystem in Bildebene ist GL_PROJECTION-Matrix verantwortlich
Aktivierung durch
glMatrixMode(GL_PROJECTION);Erzeugen von Projektionsmatrix durch
gluPerspective(fovy, aspect, near, far);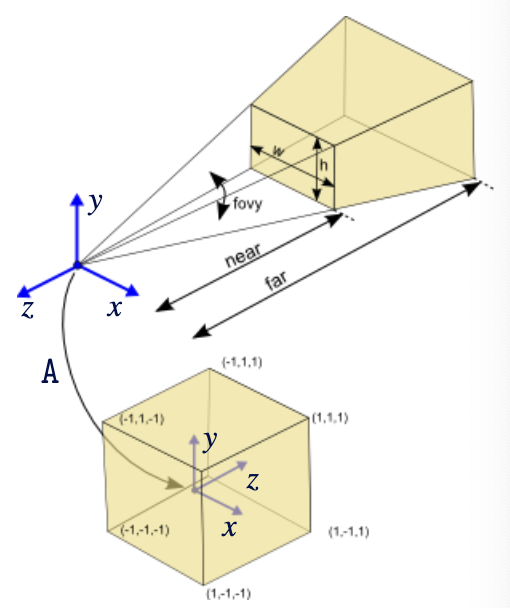
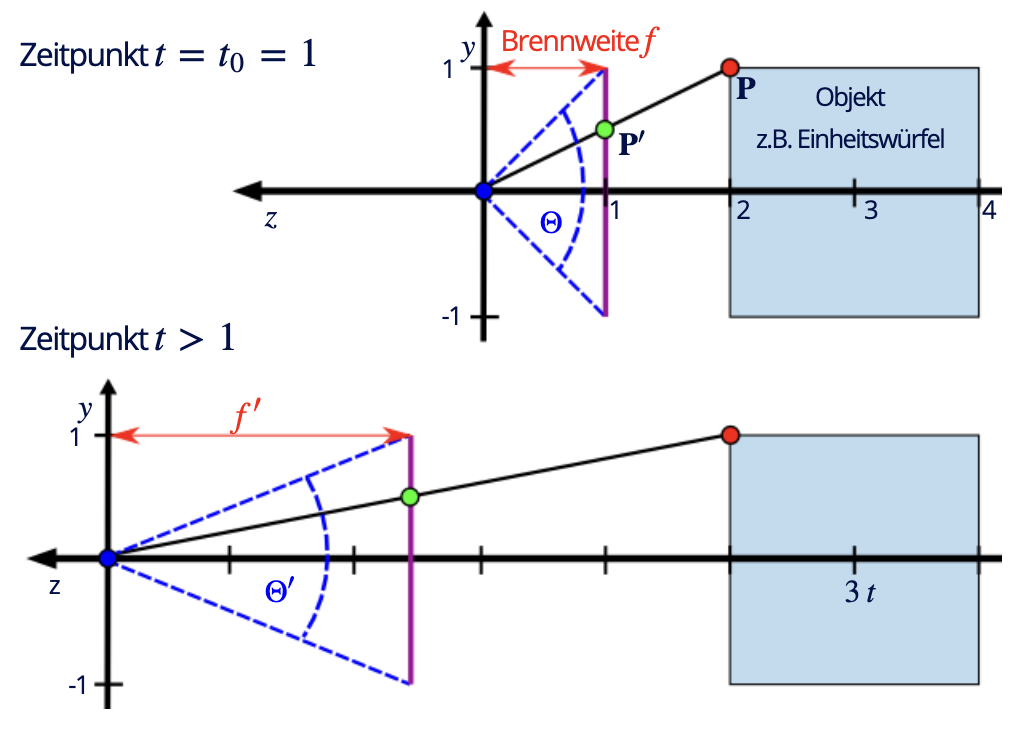
Beispiel: Dolly Zoom / Vertigo Effekt
Translation der Kamera in z-Richtung und Ausgleich durch Veränderung der Brennweite
- Durch z.B. gleichzeitiges Herauszoomen und auf "Primärobjekt" zugehen, bleibt dieses gleich groß, Perspektive und Umgebung ändern sich aber.
Transformation der Kamera
- Punkt wird vom lokalen ins Weltkoordinatensystem transformiert:
- Weltkoordinatensystem wird ins Kamerakoordinatensystem transformiert:
- Kamerakoordinatensystem wird in die Bildebene transformiert:
- Punkt wird vom lokalen ins Weltkoordinatensystem transformiert:
Transformationsmatrizen ergeben sich durch Basisvektoren (Linearkombination)
In OpenGL werden alle Transformationen zu GL_MODELVIEW-Matrix zusammengefasst, außer Projektionsmatrix
Damit beschreibt GL_MODELVIEW die Transformation aus lokalem Koordinatensystem in Kamerakoordinatensystem.
Die GL_PROJECTION-Matrix
Definition in OpenGL durch
gluLookAt(eyex, eyey, eyez, refx, refy, refz, upx, upy, upz);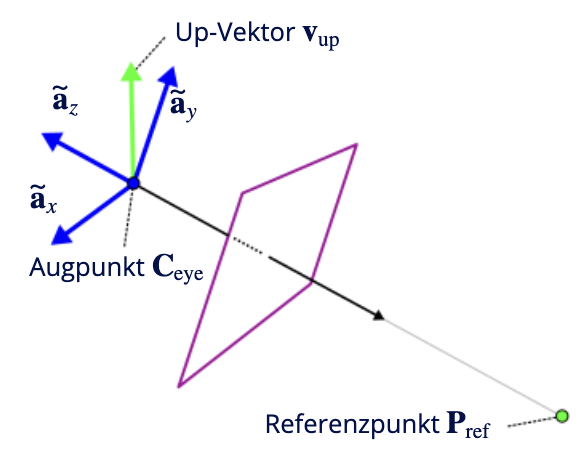
Einordnung in die fixed function pipeline
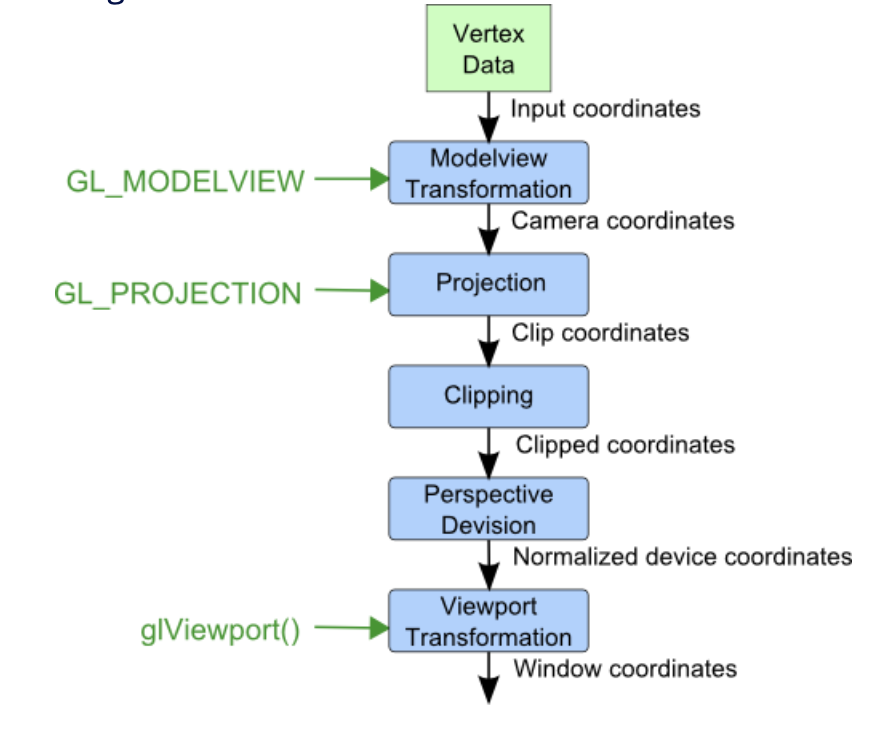
- Die beiden oberen Schritte sind Teil der Per-Vertex Operations und werden später durch Shader ersetzt.
Clipping
in OpenGL-Pipeline vor perspektivischer Division,
daher Prüfungsbereich
Die Division für geclippte Koordinaten wird damit eingespart.
Perspektivische Division
- überführt homogene Koordinaten ins kartesische Koordinatensystem durch Division durch letzt Koordinate
- hinterher sind alle Koordinaten im Bereich
Viewport Transformation
Koordinaten aus Bereich
Befehl:
glViewport(int ix, int iy, int width, int height)- z.B.
glViewport(0, 0, 1920, 1080)für FHD
- z.B.
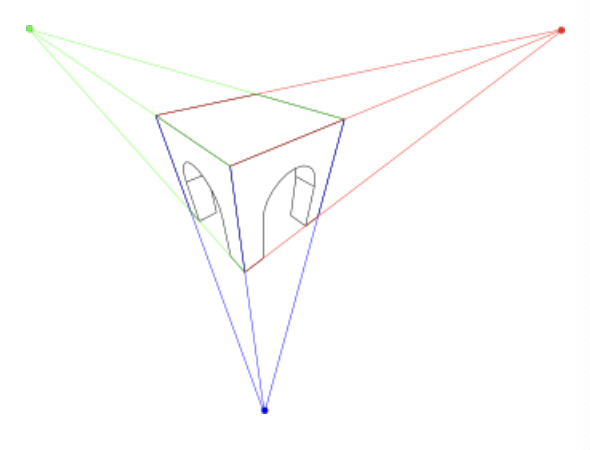
Fluchtpunkte
In perspektivischer Ansicht werden parallele Linien im 3D-Raum in der 2D-Projektion nicht zwingend parallel dargestellt.
Schnittpunkte in 2D werden als Fluchtpunkte bezeichnet
Entsprechend der Anzahl an Fluchtpunkten werden Projektionen als 1-, 2- oder 3-Punktperspektive bezeichnet.
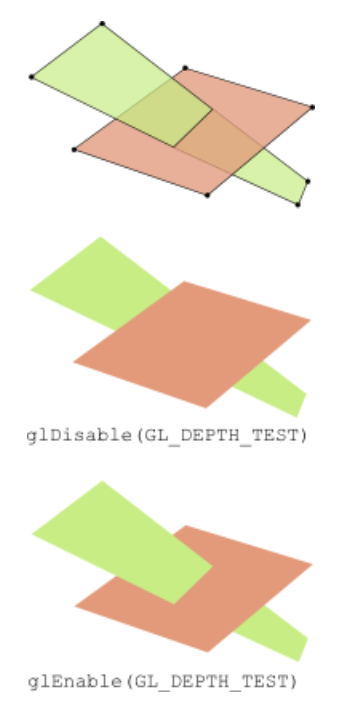
Z-Buffer
OpenGL-Implementierung für Tiefentests
- Aktivierung durch
glEnable(GL_DEPTH_TEST)
- Aktivierung durch
Wenn inaktiv: Primitive werden in der Reihenfolge ihres Pipelinedurchlaufs gezeichnet und verdecken somit ggf. vorher gezeichnete.
Wenn aktiv: Primitive, die näher an der Kamera liegen verdecken weiter entfernte.
nach perspektivischer Division (Normalized device coordinates) haben weiter entfernte Punkte größere z-Koordinaten
Depth-Buffer hält analog zum Framebuffers (Farbinformationen) die Tiefeninformationen pro Pixel
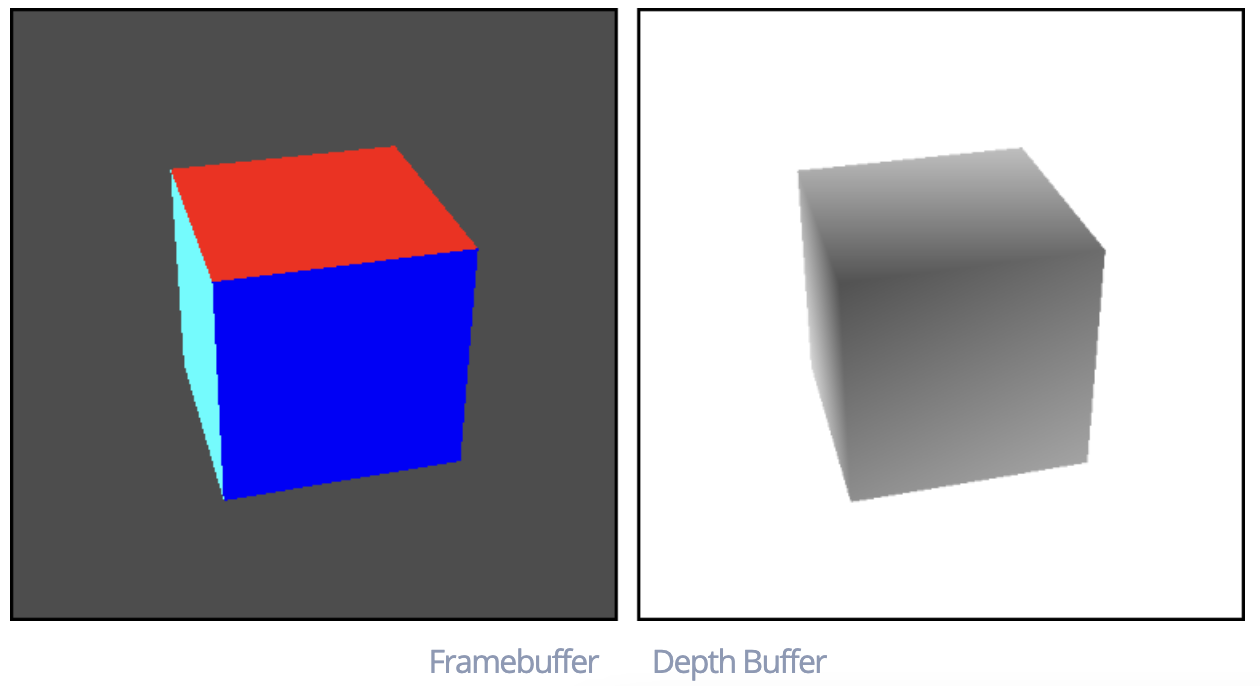
wird mit z-Wert der Far-Ebene initialisiert:
glClear(GL_DEPTH_BUFFER_BIT)Tiefenwert wird pixelweise vom Rasterisierer aus transformierten Vertex-Daten interpoliert
Pixel (in Frame- und Depth-Buffer) werden in OpenGL-Pipeline während der Per-Fragment Operations geschrieben.
Wenn Tiefenwert für Pixel kleiner ist, werden der bestehende und der entsprechende Farbwert überschrieben, ansonsten bleiben die bestehenden unverändert.
Z-Fighting
- Depth-Buffer hat nur gewisse Genauigkeit (16, 24, 32 Bit), auf dessen entsprechenden Intervall der Bereich der Normalized device coordinates abgebildet wird. Es muss somit gerundet werden.
- Genauigkeit nimmt bei weiter entfernten Objekten ab.
- Kommt es bei nah beieinander liegenden entfernten Koordinaten durch die Ungenauigkeit dazu, dass mal das eine, mal das andere dargestellt wird, bezeichnet man dies als Z-Fighting.
- Dieses Risiko wird durch möglichst geringen Bereich zwischen Near- und Farplane reduziert.